ConverseEarth实景孪生视频融合系统是一系列软件的统称,总体来说将全部视频进行归集管理后,关键部位进行全景视频融合,并实现球机追视、自动巡检等高级功能。采用云渲染部署系统,核心软件运行在云端,通过推流技术,在前端使用浏览器进行系统操控。
1、基于3D空间坐标系统,开发一套1:1复原的精细化三维模型。 2、基于3D空间渲染引擎、视频拼接融合引擎、多核并行计算、深度学习等核心引擎,实现视频资源管控、全景立体融合、局部加载点360度融合、指哪看哪(球机追视)、 全景追溯等功能。 3、支持用户以仿真场景为中心(而不是视频监控)通过鼠标浏览全局、任意角度查看视频细节、指哪看哪等。 4、系统预留高级功能扩展接口,比如:报警管理、协同标绘、AI视频识别、自动巡检等。 5、系统具有高可靠性,具有保活程序,可7X24小时不间断运行。

1、全景视频融合
将空间内的相机进行全景视频融合,融合后场站呈现一张大图,用户无需关注单个视频来源,所见即所得,在三维空间进行平推、旋转操作全景视频。 全景视频融合是一种基于实时视频图像与模型进行深度结合的三维融合处理的技术手段。需要将摄像头采集到的二维图像,通过对图像纠正畸变、展开、切割、调整、拼接等步骤,将离散的多路视频流汇集融合,将处在不同位置的分镜头视频拼接到一起,在三维模型上投射视频画面,做到视频与三维模型无缝融合,实现二维图像向三维空间的还原。

2、球机追视(指哪看哪)
摒弃传统的云台控制模式,采用以目标点为驱动的云台控制模式。操作人员无需预知球机的位置、数量及其控制范围,无需以球机云台为操作对象。 现对特定局部区域进行精细观察,通过点击三维模型,即刻触发球机追视功能。根据点击的三维坐标,系统会自动选择该点位最近的4路球机同时追视,以达到最优的观看角度和效果,四路球机的位置可互换,可单路放大。

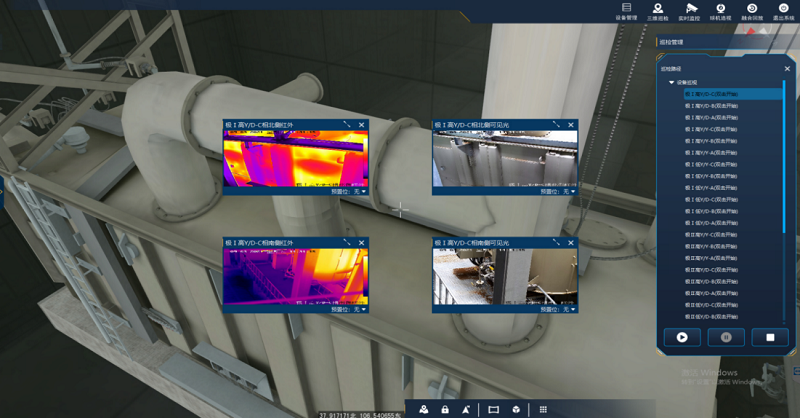
3、自动辅助巡视
辅助巡视功能能够按照预定的路线对设备、区域、特殊巡视进行周期性辅助视频巡视。系统能够让用户自定义巡视路线、巡视节点、停留时长等参数,并保持成永久路线。系统能让用户自定义巡视任务,并生成巡视报告。
北京中天灏景科技有限公司版权所有
联系电话:13521069337、15910745136
技术支持QQ:915707345
© converseEarth
京ICP备10038645号-2